計算知能・マルチメディア研究室では、ロボットなどのハードウェアを計算知能に基づいて最適設計する研究にも取り組んでいます。特に、ドローンの機能改良についての挑戦的な取り組みを日々行っております。その研究内容について、いくつか紹介したいと思います。
ドローンの危険性を根本的に取り除く~コアンダドローン~
ドローンは、ご存知のように2010年代から爆発的に普及し、その性能も飛躍的に向上してきております。一方で、我々が大きく見落としていることがあります。それは、ドローンの安全性です。ドローンそれ自体の取り扱いに注意が必要ですが、特に高速で回転するプロペラは深い傷を負う程の危険性があります。この危険性を回避するため、「そもそもプロペラをなくすことはできないだろうか?」という挑戦が始まりました。しかし、プロペラはドローンの推力源となるものでもあります。飛行のために不可欠な推力を取り除けば、飛行そのものが困難になるという矛盾が生じます。必要なのに取り除きたい、この相反する難題を解決するための試行錯誤の末、プロペラは搭載しているが、外部に露出していないドローンを開発しようと、既存のドローン分野に一石を投じたのが本研究室の渡邉さんです。
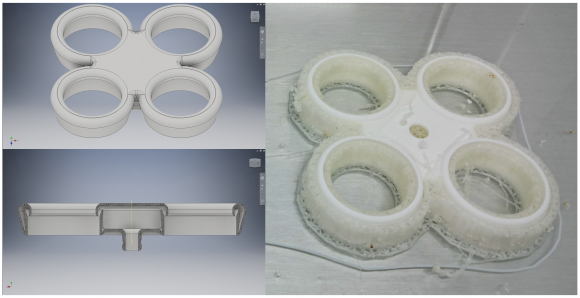
渡邉さんは、コアンダ効果を応用したドローンの研究開発に取り組みました。皆さんはDyson社による羽根のない扇風機はご存知かと思います。この扇風機のように、推進機構に羽根のない噴出ノズルを採用しているのが、コアンダドローンです。ノズルから噴出された空気が、さらに周囲の空気を引き込みながら同方向に流れていくことで、ドローンを浮遊させるだけの強い気流を生み出します。この効果を利用してドローンを飛ばすことに挑戦したのです。しかし、機体を安定飛行させるのはなかなか難しい挑戦でした。
そこで渡邉さんは、ノズルに空気を送る動力機構の設計を工夫しました。さらに、ノズルの形状を工夫することで、排出される空気の量を増加させることに成功しました。これにより、プロペラによる危険性を根本的に取り除くという斬新なドローンの開発に貢献したのです。
皆さんはライト兄弟をご存知かと思います。彼らの最初の飛行距離は約36.5メートル、飛行時間は僅か12秒でした。しかし、今空を見上げれば、飛行機は当たり前のように飛んでいます。彼らの最初の一歩は小さく、決して完璧と言えるものではなかったかもしれません。しかし、現代の航空技術や社会に多大な影響を与えたのです。「誰にとっても安全なドローンを開発したい」という志をもって試行錯誤を重ね、実現へと導いた渡邉さんの取り組みは、ライト兄弟に通じるものがあります。入念な研究と実験を繰り返し、独自の推力技術を創り出しました。既存の概念に捉われない発想が、安全性と安定飛行を両立させるという新しい可能性を生み出したのです。

本研究室では、このような新たな着想、自由な挑戦意欲をもって、一緒にドローン開発をしてゆきたいという仲間をお待ちしております!
世界最高のドローン研究室
2019年11月5日、世界最高峰のロボットの国際会議IROS2019のドローンの自律飛行競技大会において、わが計算知能・マルチメディア研究室のドローンタスクフォースチームが優秀しました。この競技大会には、世界各国の強豪、メリーランド大学(米国)やデルフト工科大学(オランダ)が参加しておりましたが、それらを抑えての見事な優勝でした。このようなコンペに挑戦したいというメンバ、ぜひ一緒にやりましょう。
また、この優勝については各方面で高く評価され、日本経済新聞(2020年2月17日)にも掲載されました。



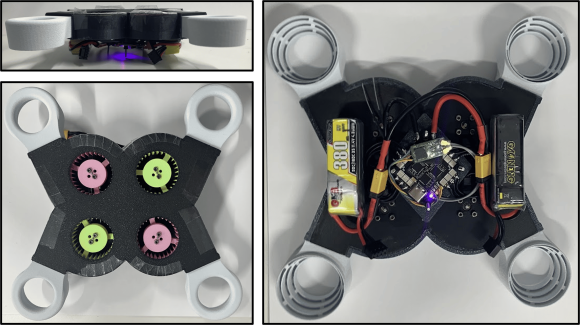
コンパクト安全ドローン
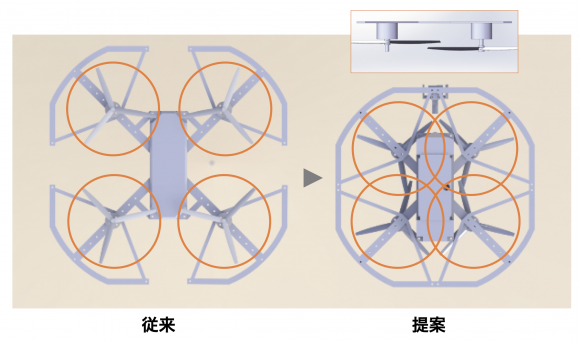
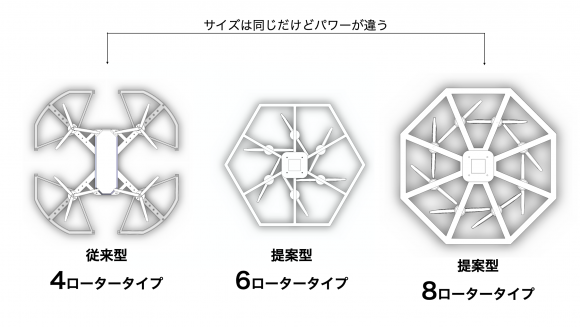
ドローンは、誰でも手軽に扱えると思われがちですが、実際に飛ばしてみると、その危険性、とくにプロペラ部分について危険と感じることが多いです。本研究室では、この危険を回避するため、ドローン全体をコンパクトにし、ガード全体で覆うタイプのドローンを開発しています。ドローン全体を球体のように覆うタイプのものもありますが、それらは非常にサイズが大きくなってしまうのが難点です。本研究室のドローンはそのようなことはなく、ローター部分を重複させるという、これまでにない斬新なアイデアでコンパクトで安全なドローンの開発に成功しています。

安全なコアンダドローンへの挑戦
コンパクト安全ドローンは、これまでにはない斬新な挑戦でしたが、それでもプロペラのリスクを完全に取り除けているわけではありません。計算知能・マルチメディア研究室では、このプロペラのリスクを完全に克服するための次なる挑戦、コアンダドローンの研究・開発に着手しております。コアンダドローンとは、簡単にいえば、推進機構にダイソンのドライヤーのような羽のない噴出ノズルを搭載しているドローンです。



こちらの研究についても高く評価され、霜村君が見事、農業情報学会の論文賞を受賞しております。
連結型ドローンへの挑戦
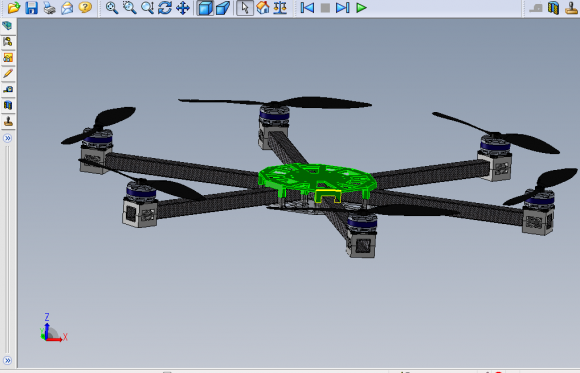
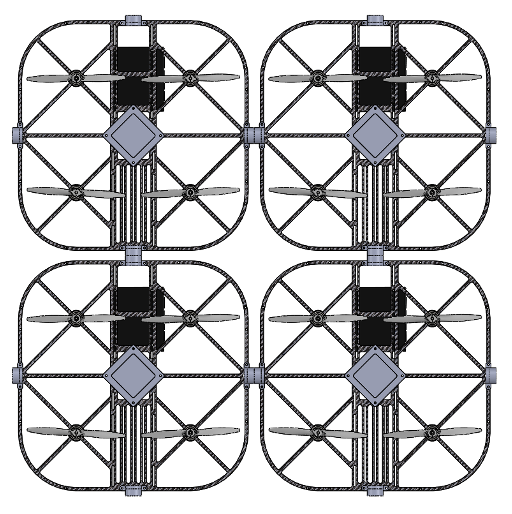
これまでのドローン分野では、基本的に1機体を運用するということに注力していますが、計算知能・マルチメディア研究室では、複数のドローンが本質的に強調して機能する、連結型ドローンを研究・開発しております。例えば、重いペイロードへの対応、また、農業の文脈で言えば、基線長が安定した多視点からの同期撮影なども実現できると予想しています。
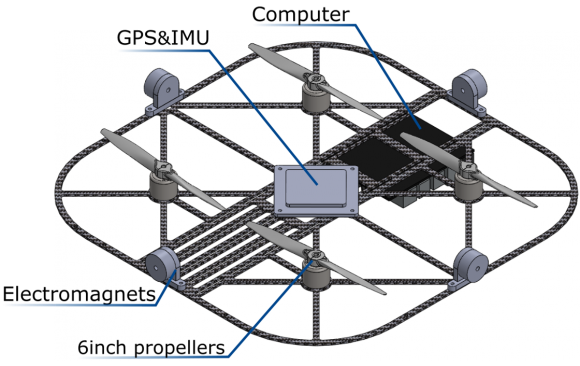
合体前の1機体モジュール
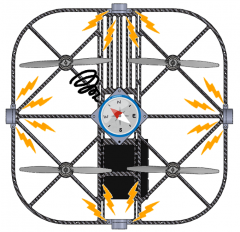
一方、連結機構に電磁石を利用すると、電磁石は連結後の地磁気センサによる計測を乱してしまうため、ドローンの自動制御に重要な自己姿勢の推定が困難になってしまいます。これを克服するため、RTK-GPSを複数個からの情報をフュージョンする拡張カルマンフィルターを用いて、姿勢を推定する手法を提案しています。
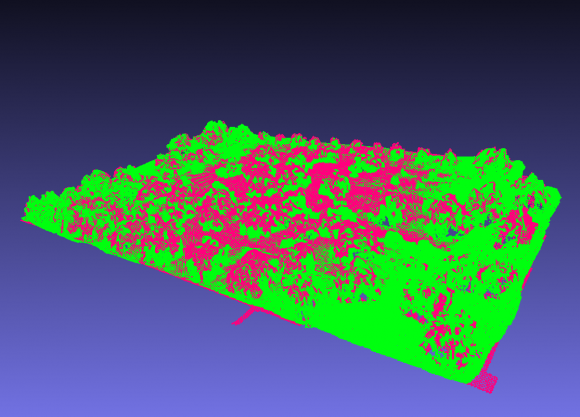
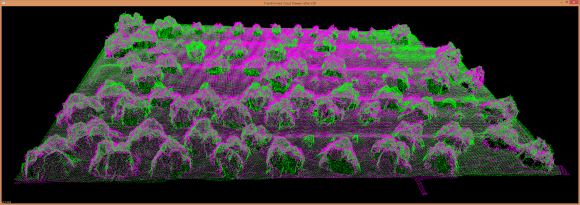
これまでの取り組みの紹介
少し昔の画像になりますが、かつて計算知能・マルチメディア研究室では、以下のようなに、ドローンを使った農業の取り組み、などを行っておりました。