Mission 1: Vegetation Map Archiving Using Unmanned Aerial Vehicle
In Computational Intelligence and Multimedia Laboratory, we develop UAV (Unmanned Aerial Vehicle) equipped by ultra-high-definition camera to capture image/video from target field such as agriculture field, mine crops, etc. By our method, it possible to construct the data continuously (time) and spatially (place). We also accept number of research funded from relevant ministries and companies, to apply from theory to real application. It is also targeted to be used in wide range purpose.
 |
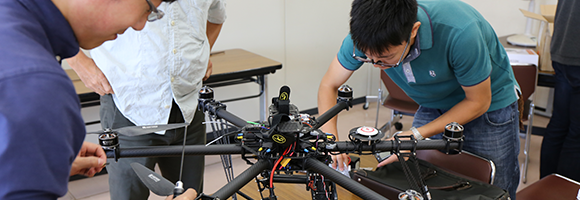
Our lab member is holding one of propellers from quadcopter. In our laboratory, we many type of multicopter, from small one until big one around 1 m diameter. All will be used properly respect to their capabilities. |
 |
 |
This UAV equipped with GPS, gyro sensor, geomagnetic sensor, and other sensors. With these all sensor, it is possible to have stable flights and program multi-waypoints by using ground station.
 |
 |
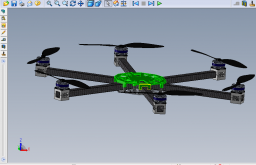
In the left bottow, we try to confirm about how to capture real time image by monitored it using small monitor. On the right bottom, the image is showing result of multicopter design software, which enable us to design our own multicopter.
 |
 |
Currently, we have tried to take image from Kazusa DNA Research Institute and NARO Okitsu Research Center
 |
 |
-

Movie for ICPR2012 Technical Tour
2012/11/27